Технология лазерного сканирования
Будучи одним из наиболее прогрессивных направлений в развитии средств дистанционного зондирования, воздушное лазерное сканирование (далее — ВЛС) находит все большее применение в таких отраслях, как инженерные изыскания, землеустройство и кадастр, лесное хозяйство и многих других. В комбинации с цифровой аэрофотосъемкой ВЛС дает возможность получения трехмерного массива точек лазерных отражений (далее — ТЛО), плотностью до нескольких сотен точек на 1 м2 и точностью определения их координат 3-5 см в плане и по высоте. Фактически — это цифровая модель истинной поверхности, основа для ортофотопланов, цифровых топографических планов масштабов 1:500 и мельче, трехмерных моделей рельефа, зданий и сооружений.
Сущность технологии ВЛС заключается в пространственной привязке облака ТЛО, что осуществляется на базе данных основных компонентов системы сканирования: сенсора (LiDAR) с функцией измерения расстояний, ГНСС-приемника с функцией регистрации данных спутниковых наблюдений для расчета пространственного положения, а также инерциального блока с функцией записи угловых и линейных ускорений для измерения пространственной ориентации. Такой набор исходных данных позволяет однозначно определить координаты каждой ТЛО путем решения прямой геодезической задачи.
Первым этапом ВЛС является сбор данных дистанционного зондирования Земли – съемка с беспилотника или пилотируемого летательного аппарата. При проектировании полетных заданий необходимо учитывать желаемое перекрытие между «проходами» – коридорами ТЛО, получаемыми при движении по рабочему маршруту (участку траектории между поворотами), важность минимизации отклонения от заданной высоты полета и разницу между максимальной дальностью и рабочей высотой сканирования. Представим воздушное судно, выполняющее полетное задание в целях проведения ВЛС вдоль оси Y (рис. 1).
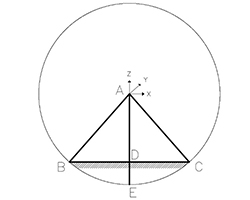
Рис. 1. Схема расчета перекрытия при известной максимальной дальности и заданной высоте сканирования
На БПЛА установлена система сканирования серии АГМ-МС. Очертим около оси полета окружность радиусом равным максимальной дальности сканирования. Ширина коридора ТЛО, полученного при движении по траектории на рабочей высоте «AD» равна отрезку «BC». С увеличением высоты полета до максимальной дальности сканирования («AE», равно как и «AB» и «AC») ширина коридора стремится к нулю (точка E). Для получения 50% перекрытия между «проходами» следует установить расстояние между смежными гласами равным отрезку «BD» («DС»). Перекрытие устанавливается в целях обеспечения равномерности распределения величины плотности ТЛО, исключения оптических теней от высотных объектов и для контроля качества данных ВЛС путем оценки сходимости смежных коридоров.
Установленные в системе сканирования ГНСС-приемник и инерциальная навигационная система совместно с данными наземного ГНСС-приемника (базовой станции) служат реализации следующего этапа технологии – получению комбинированного решения траектории. Решение представляет собой последовательность точек с рассчитанными дифференциальным методом точными координатами и углами ориентации, полученными после обработки данных инерциального блока. Дискретность траектории определяется частотой записи инерциальной навигационной системы (для АГМ-МС – 500 Гц). Иными словами, перемещение системы сканирования в пространстве в течение 1 с регистрируется 500 точками с атрибутами координат и углов ориентации (рис. 2).
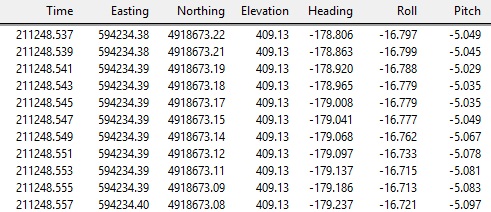
Рис. 2. Представление траектории движения
Качество расчетной траектории принято оценивать по двум основным показателям, а именно – разнице в определении расчетных величин координат и углов ориентации между прямым и обратным решениями траектории. Компания «АГМ Системы» предлагает пользователям два программных продукта с функционалом решения траектории: AGM PosWorks Web и AGM ScanWorks Pro. На рисунках 3, 4 представлены графики изменения неоднозначности комбинированного решения траектории в определении расчетных координат и углов ориентации на примере ПО AGM ScanWorks Pro.
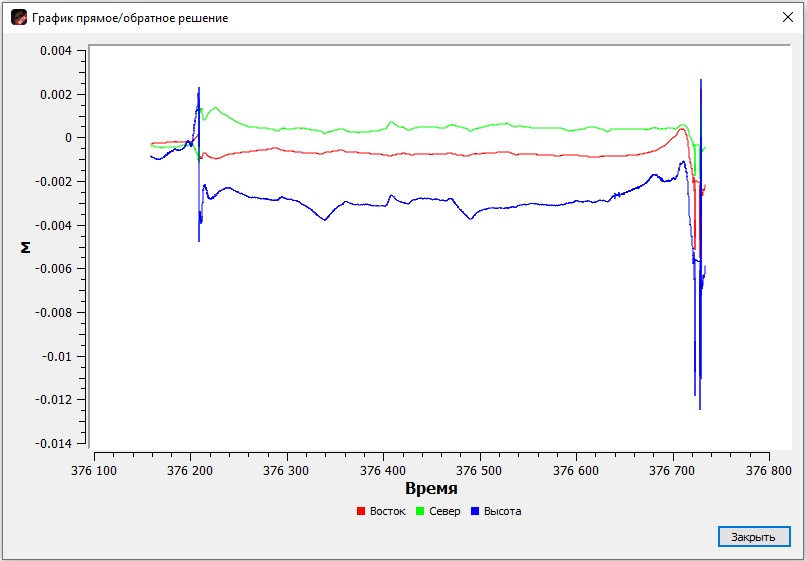
Рис. 3. Изменение неоднозначности расчетных координат
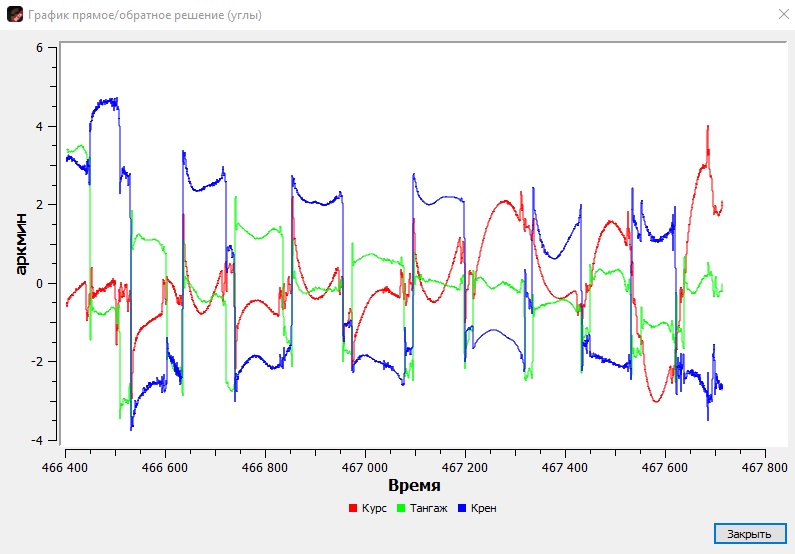
Рис. 4. Изменение неоднозначности расчетных углов ориентации
Наличие готового решения траектории оставляет пользователя перед финальным этапом вывода данных ВЛС – получением координированного облака ТЛО и параметров внешнего ориентирования. В комплекте поставки программно-аппаратного комплекса серии АГМ-МС эту задачу выполняет ПО AGM ScanWorks. На рис. 5, 6 представлены примеры облака точек, раскрашенного по атрибуту абсолютной высоты, и файла параметров внешнего ориентирования аэропозитивов для последующего составления ортофотомозаики.
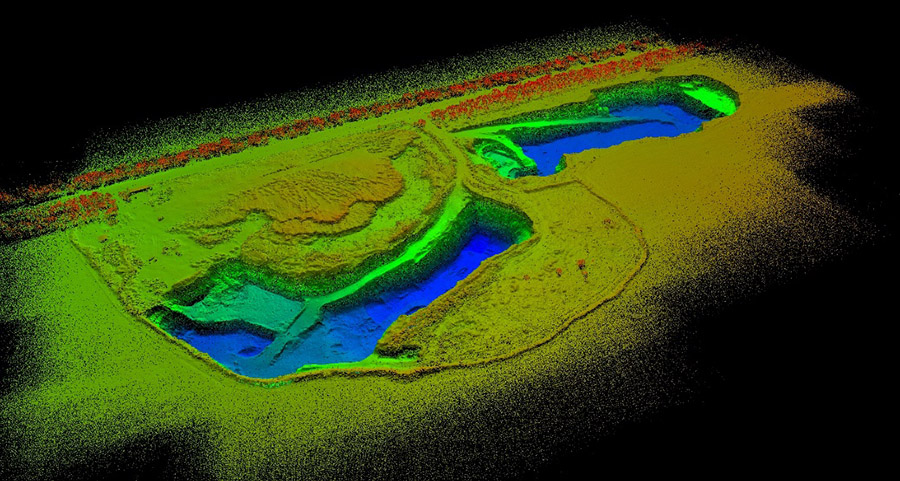
Рис. 5. Пример облака ТЛО, полученного методом ВЛС
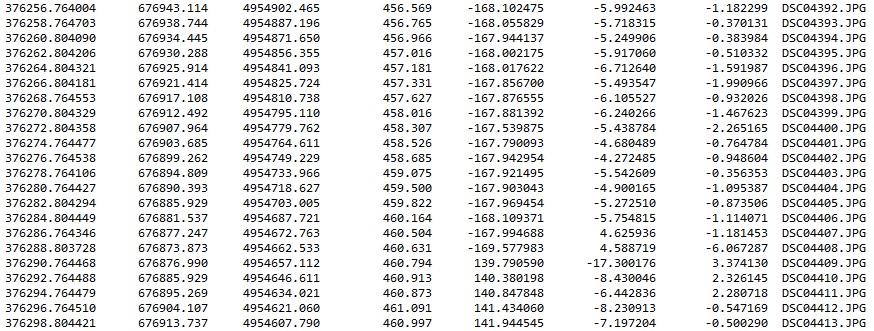
Рис. 6. Параметры внешнего ориентирования снимков АФС
Содержание дальнейшей постобработки облака ТЛО зависит от конечной задачи производства работ. Кратко рассмотрим применение данных лазерного сканирования при создании цифровых топографических планов (далее – ЦТП). Здесь одним из важнейших этапов обработки сырого облака точек является классификация исходного массива для построения цифровой модели рельефа (ЦМР) – будущей основы для изолинейного моделирования рельефа в ЦТП разных масштабов (рис. 7).
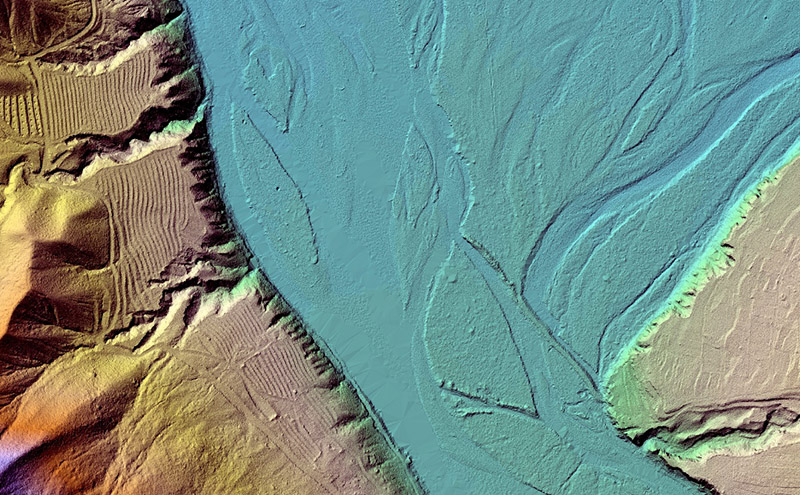
Рис. 7. Пример растровой цифровой модели рельефа высокого разрешения со светотеневой отмывкой
Неотъемлемая часть этого этапа – генерализация точек полученного класса «Земля» соответственно масштабу выпускаемых планов.
Одно из самых главных средств камерального дешифрирования при построении топоплана – цифровой ортофотоплан. Создание ортофотоплана возможно при использовании двух основных методов: фототриангуляции по перекрывающимся стереопарам снимков и прямого позиционирования по готовым расчетным параметрам внешнего ориентирования. В обоих случаях для проецирования снимков необходима также цифровая модель рельефа или поверхности. При этом, с использованием готовых ТЛО класса «Земля», полученных методом ВЛС, построение ортомозаики существенно ускоряется. На рисунке 8 представлены цифровая модель рельефа, цифровой ортофотоплан и топографический план как результат работы.

Рис. 8. ЦМР (в виде светотеневой отмывки), ортофотоплан и топоплан
В целом, высокая скорость съемки, ее детальность, точность и оперативность получения результатов за счёт возрастающей степени автоматизации и упрощения обработки данных дистанционного зондирования делают производство инженерных изысканий (особенно, масштабных проектов) все более немыслимыми без ВЛС.